Standard CAN or Extended CAN. CSMA means that each node on a bus must wait for a prescribed period of inactivity before attempting to send a message. A brief CANBUS protocol description and how it is used at ALMA. Although CAN was originally developed in Europe by Robert Bosch for automotive applications, the protocol has gained wide acceptance and has become an open, international ISO standard.
As a result, the Bosch CAN 2. B specification has become the de facto standard that new CAN.

In reality, there are many standards to choose from. CAN is extremely Robust communication Protocol. Here are three examples why. Any CAN node on the BUS can detect errors in the message, and force the message to be destroyed and retransmitted… this feature helps to ensure that the message a node does receive contains valid data.
The CAN Frame requires that. It was the hour of birth for one of the most successful network protocols ever. Today, almost every new passenger car manufactured in Europe is equipped with at . However, it can also fulfill the data communication needs of a wide range of applications, from high-speed networks to low-cost multiplex wiring.
CANBus Protocol Frame Can Message Frame.
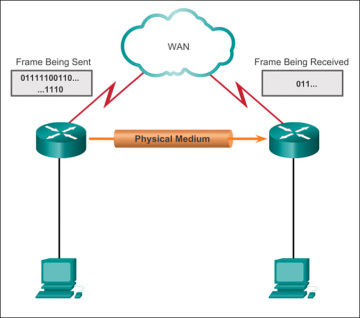
This interface is use employing serial binary interchange. Information is passed from transmitters to receivers in a data frame. CAN protocol , however, solves the collision problem using the principle of arbitration, where only the higheest priority node is given the right to send its data.
There are basically two types of CAN protocols : 2. Abstract: An automotive network needs to accumulate as much data as possible during motion to function in real-time, so that the system can respond to external influences accordingly. Therefore, the protocol-level is not versatility and unpractical. CAN , a high-integrity serial bus system for networking intelligent devices, emerged as the standard in-vehicle network. CAN and CAN FD bus decoding.
Today it is also widely used in industrial process control and aerospace applications. CAN bus and UAVCAN protocol ¶. It allows microcontrollers and electronic devices to . CAN is a message-based protocol originally designed for automotive applications, but it is also used in other areas such as industrial automation. Controller Area Network ( CAN network) is a vehicle bus standard that allows microcontrollers and devices to communicate with each other within a vehicle.